Projects
PhD in Automotive Engineering for Intelligent Mobility
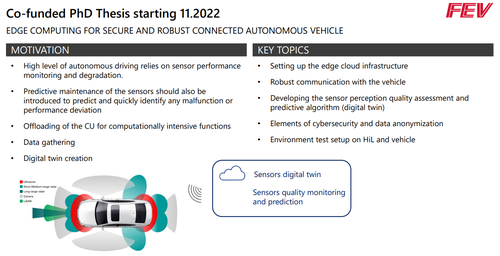
Edge computing for secure and robust connected autonomous vehicle
Within the framework of the GMRL, we are offering a joint PhD FEv/UniBo on the topic Edge computing for secure and robust connected autonomous vehicle.
Apply by August 2nd here https://www.unibo.it/en/teaching/phd/2022-2023/automotive-engineering-for-intelligent-mobility-1
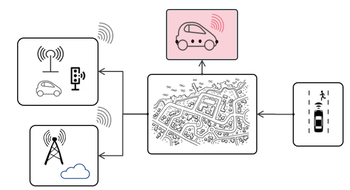
Vision zero aspires to minimize fatalities or serious injuries due to human driver error, and it relies on high levels of automated driving, such as L3+. Higher levels of vehicle autonomy are achieved by combining several sensors via sensor fusion and other information based on connectivity from other vehicles or infrastructure. In this work, we focus on the former and in particular on monitoring the performance of ADAS sensors such as radars, lidars, and cameras. In the framework of this project, we will first develop and build the edge cloud infrastructure to support gathering of big data as well as the sensors´ digital twins. Then a robust communication between the cloud and the vehicle will be ensured, including elements of data anonymization and cybersecurity. The next step will be the core of the research project: the development of functions to assess the sensors perception quality as well as predict its performance degradation. Finally, we plan on testing the setup using a HiL validation platform made available by FEV Italia. This research project has the aim to develop functions for ADAS sensors perception quality assessment and performance prediction relying on AI techniques. These functions will run on an edge cloud infrastructure that communicates robustly with the vehicle.
Design and development of a V2X and ADAS validation platform for a safe and sustainable mobility.
Original title (IT)
Progettazione e sviluppo di una piattaforma di validazione V2X a ADAS per una mobilitá sicura e sostenibile
- Typology: Publicly funded grant activity
- Partner: Regione Emilia Romagna, CNR and FEV Italy
- Period: 2019 - 2022
- Description: Set up of a HIL fast prototyping and validation platform with V2X connectivity and ADAS sensors and functions.
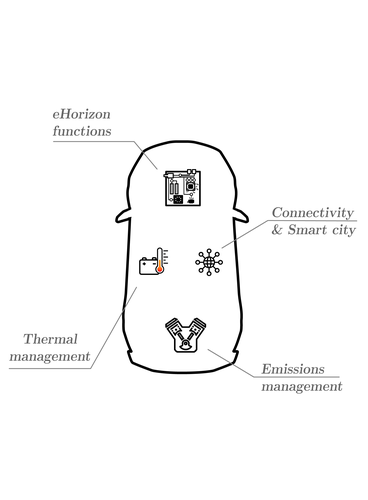
Predictive Thermal Management
- Typology: Ph.D. activity
- Partner: OEM
- Period: 2018 - 2021
- Description: predictive High Voltage Battery Thermal Management in order to improve and enlarge the electric driving, to maintain as much as possible the performances constant over driving event end life, and improve the interaction with vehicle thermal management and BMS functionalities.
Predictive Emissions Management
- Typology: Ph.D. activity
- Partner: --
- Period: 2019 - 2022
- Description: emissions reduction and optimization based on planned driving event using advanced Machine Learning models.
Predictive Energy Management
- Typology: Ph.D. activity
- Partner: --
- Period: 2016 - 2019
- Description: modelling and optimization of Energy Management Strategies for Hybrid Vehicles, focusing on real-time sub-optimal minimization and offline backward optimization algorithm based on the knowledge of the future driving path.
eMotor Control Development
- Typology: Commissioned research
- Partner: FEV Europe GmbH
- Period: July 2018 - October 2021
- Description: development of powertrain functions in order to improve the energy management, comfort and safety of a PHEV vehicle.