Laboratory
In the last decades, the urbanization and the advance in technology led to an increasing number of vehicles on the roads, resulting in a more polluted air and more congested urban centers. This can be mitigated with the advent of Hybrid Electric Vehicles equipped with telecommunication devices. In fact, the flexibility granted by multiple sources of propulsion and the access to information on what is happening outside of the vehicle can clear the way to predictive control strategies development.
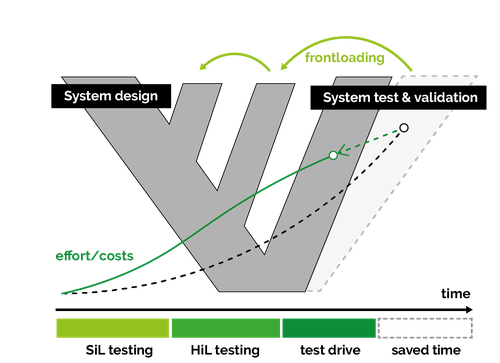
As it is easy to imagine the developing of this complex framework collides with the shortening of the vehicle time-to-market. A recent survey shows that the 68% of the automotive companies have now a product development and launch cycle under two years. The old consolidated methodologies (reliable road tests above all) does not fit anymore because the safety validation of a current driver assistance system alone requires up to 2 millions test kilometers. In addition, most of the situations under control regard dangerous and highly- variable test conditions.
Thus, the tendency is to move all the driven kilometers from the roads to advanced simulation environment in a process called "from-road-to-rig-to-desktop".
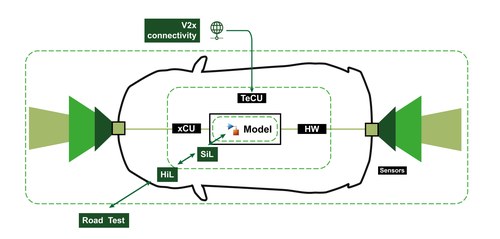
The laboratory is focused on the setup of an innovative development and simulation environment for the validation of predictive control strategies for connected vehicles supported by cloud-based mobility services. The target is to ensure tests safety and repeatability with traffic simulation capability. The simulation environment consists of a connected Hardware-in-the-Loop system to test a supervisor controller (Hybrid Control Unit). In addition to all the advantages of a conventional HiL simulation, it can receive data from cloud service provider and from the nearby devices (such as route data and information from infrastructures and other vehicles). The over-the-air connection between the powertrain controllers, the server (LTE UE) and the On-Board Unit (ITS-G5) is handled by means of a custom connectivity control unit with proprietary functionalities.
Our laboratory is able to exchange the V2N, V2I and V2V communication the networks using the more common V2X protocols as it was in a real vehicle: LTE and DSRC.
Validation approach
- Focusing on function development, the procedure starts from the algorithm definition and the following implementation in the Simulink model (Model-in-the-Loop and Software-in-the-Loop);
- The eHorizon functions and the relative software are made ready for the Hardware-in-the-Loop, where the Hybrid Control Unit interfaces are tested
- Then, moving toward the in-vehicle testing, the same Control Unit software is tested along with all the other components within the real vehicle. This part of test will go under the 10% of the amount of time effort.
FEV HIL Laboratory Ecosystem
The Green Mobility Research Lab is part of a larger ecosystem of HIL laboratories within FEV Italy. While the GMRL focuses on eHorizon function development, FEV is developing in association with CNR, a validation platform for connected and assisted vehicles.
ADAS and V2X HIL Validation Platform
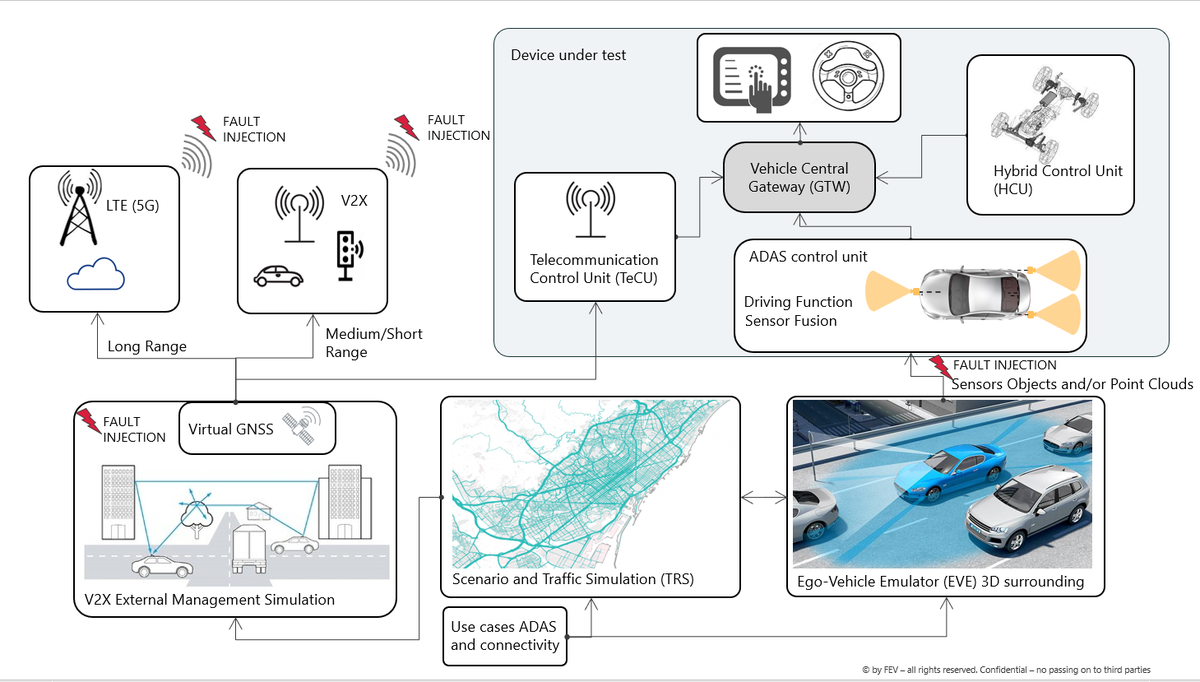
While the GMRL focuses on eHorizon function development, FEV is developing in association with CNR, a validation platform for connected and assisted vehicles.
The platform consists in a HiL and SiL environment for ADAS/V2X fast prototyping and validation. The objects under test are ADAS vehicle functions, control units and the Human Machine Interface (HMI) set up.
The ego vehicle and other traffic participants, as well as the infrastructures are modelled in a 3D environment, so that the surrounding environment can be perceived by a customizable set up of ADAS sensors. In addition, some of the vehicles are connected and exchange information on their position and heading. At every step of the information chain, we can perform fault injection as well as test the system´s resilience to external attacks.
Moreover the driver experience and involvement is tested in a driver-in-the-loop set up.
