

Research activities of the u3S lab encompass: - Autonomous navigation systems - Space situational awareness - Attitude and orbit control systems for small-sats - Mission analysis and design
The focus is on the study and development of accurate and cost-effective solutions for autonomous collision avoidance. The increasing space traffic is increasing the number of candidate conjunctions between spacecraft. Those candidate conjunctions are becoming too numerous to be addressed manually in the classical way. Wthin this framework, research on collision probability and risk indexes computation attempts to limit the number of cases to those strictly needed to keep a given safety level. At the same time research within conjunction mitigation procedures attempts to automate the process to be performed faster and more accurately. Particular attention is given to state-of-the-art automated procedures and their integration into the existing infrastructure.
ABACO, togheter with ASI and SpaceDyS, is an heritage project of the group in this field along with OB-ASTRA, a newer project lead by Nautilus and funded by ASI and ESA.

Pointing accuracy and stability is critical in S/C operation. Algorithms for attitude control and determination of nanosatellites rely on limited hardware and have to meet specific requirements. As part of the laboratory work, advanced control topics are employed to guarantee a higher level of performance in nanosatellites operation.
The Attitude Determination and Control System (ADCS) is a crucial subsystem in a spacecraft and one the major source of mission failures. To guarantee reliability of related algorithms and hardware, they have to be tested on-ground. The on-orbit environment is simulated thanks to the simulation testbed developed inside the laboratory to test nanosatellites ADCS. As part of the laboratory work the developed algorithms are validated on the testbed
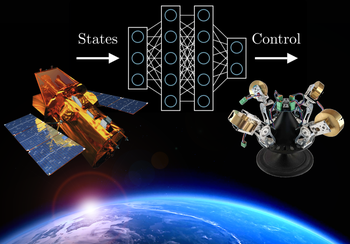
This co-sponsored research project (ESA Open Space Innovation Platform) aims to improve the autonomy of future spacecraft missions requiring highly agile attitude maneuvers using variable-speed control moment gyroscopes (VSCMGs). While reaction wheels are often preferred for their simplicity, VSCMGs offer significant advantages in terms of agility, energy efficiency, and singularity management. Recent advances in machine learning have shown that neural networks are a promosing alternative to traditional model predictive control. Even under challenging nonlinear conditions, they can approximate optimal state feedback policies at a significantly lower computational cost.
The developed guidance & control algorithms will be benchmarked against established Attitude and Orbit Control Systems in simulations and hardware-in-the-loop experiments at the Attitude Control Air Bearing Facility (ESA-ESTEC).
Mission analysis is fundamental to the definition and optimization of orbital trajectories and operational scenarios for small satellite missions. Starting from the formulation of mission and system requirements,this process involves the evaluation of platform constraints from the earliest mission phases.
As part of the laboratory work, mission analysis techniques are applied to ensure the success of CubeSat missions through simulations and trade-off studies. These activities are carried out using dedicated mission analysis and system simulation tools (e.g., MATLAB, ESA DRAMA ), as well as CAD models to account for system-level constraints.
Key activities include the simulation of Sun-observation windows, ground station contact time analysis, and the performance evaluation of space-based IoT communication services. The research also covers the definition of essential technical budgets,including power, link, pointing, and mass budgets, as well as Space Debris Mitigation (SDM) assessments, which include atmospheric re-entry simulations and casualty risk evaluations. These analyses are critical to ensure mission reliability and compliance with international safety standards.
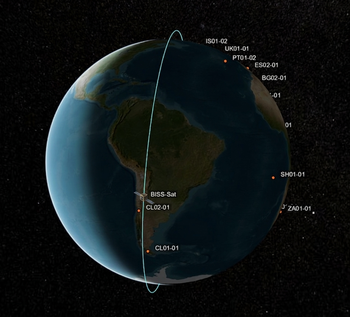
The population of man-made resident space objects in the Earth orbital environment is getting overcrowded throughout the years since the launch of the first spacecraft in 1957. The lion's share of this population is space debris, that is, defunct spacecraft, stages of launchers, and fragments coming from explosions, fragmentations, or collisions. Regarding active spacecraft, there is a trend towards mega-constellations in low Earth orbit for telecommunication purposes as well as the launch of more and more CubeSats on behalf of private companies and research centers thanks to their relatively low cost. As a consequence, the risk of collision between resident space objects is increasingly large. If collisions are not stopped, they will create further debris and, eventually, trigger a chain reaction knwon as the Kessler syndrome, which would deny the access to orbits of scientific, social, or economic relevance to future generations.
To deal with this problem, the space community has identified several strategies, including Space Situational Awareness, i.e., the monitoring, tracking, and characterization of objects in Earth's orbit using ground-based or spacecraft-based sensors in order to predict and avoid collisions.
The Microsatellites and Space Microsystems Laboratory of the University of Bologna is involved in this task through the following activities:
1. development of on-board autonomous collision avoidance systems by means of inter-satellite radio links and optical sensors
2. collaborations with other resarch centers working in the field of Space Situational Awareness
3. research on novel sensing technology, such as event-based cameras
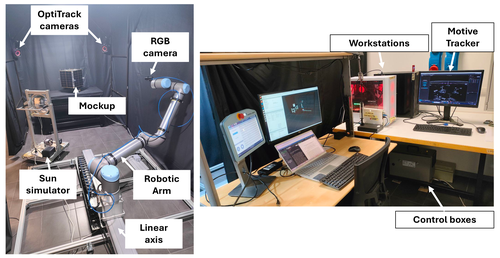
Monocular vision-based navigation is a key enabling technology for active debris removal and in-orbit servicing missions, where close proximity operations require accurate knowledge of the relative pose (position and orientation) between a chaser and its target. In this context, cameras are attractive sensors due to their low cost, mass, and power consumption. However, space imagery is highly challenging due to harsh illumination conditions and high noise levels, making pose estimation a complex task. Deep neural networks are a promising approach for image processing, but still suffer from domain gap between synthetic and real imagery and remain computationally demanding.
To address these limitations, the Microsatellites and Space Microsystems Laboratory conducts research on algorithm optimization for embedded deployment and uncertainty quantification. In 2025, the laboratory commissioned a Hardware-in-the-Loop (HIL) testbed for on-ground validation, featuring a 7 degrees-of-freedom robotic arm, a sun simulator, and an OptiTrack motion capture system, enabling automated generation of real HIL image datasets.
Heritage Projects


